

DOF
For any design which includes the use of mechanical components. It’s important to analyze the model for its limitations, degree of freedom, any constraints which couldn’t be visually observed.
An analysis is as follows:
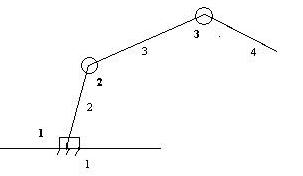
Order of the system, λ = 3, due to the planar motion of the links
Number of links (nL) = 4
Number of Joints (nj) = 3
Mobility, F = λ (nL- nj – 1) + ∑njfi
F = 3 (4 –3 –1) + (1+1+1)
F = 3 (0) + 3
F = 3 F > 0, Therefore it is a machine
F = nj = 3 (Open chain)
F = λ = 3 (non-redundant)
The mobility of the robot arm system was obtained to be 3, which represented many of the features about the system performance. The number of joints of the system equalled mobility of the robot arm system, thus, informing the system is an Open chain system. Order of the system also equalled the mobility of the system from which it was known that the system is non-redundant. Overall, the mobility analysis provided with the results that presented the working nature of the robot arm system.