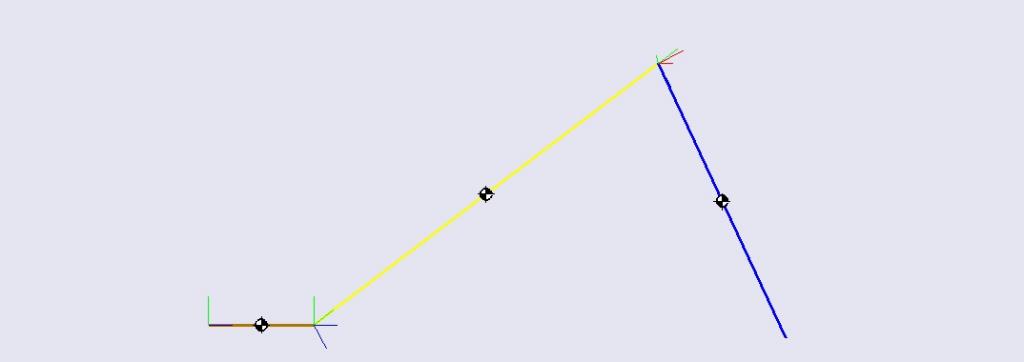
Simulations for ARM CONTROL
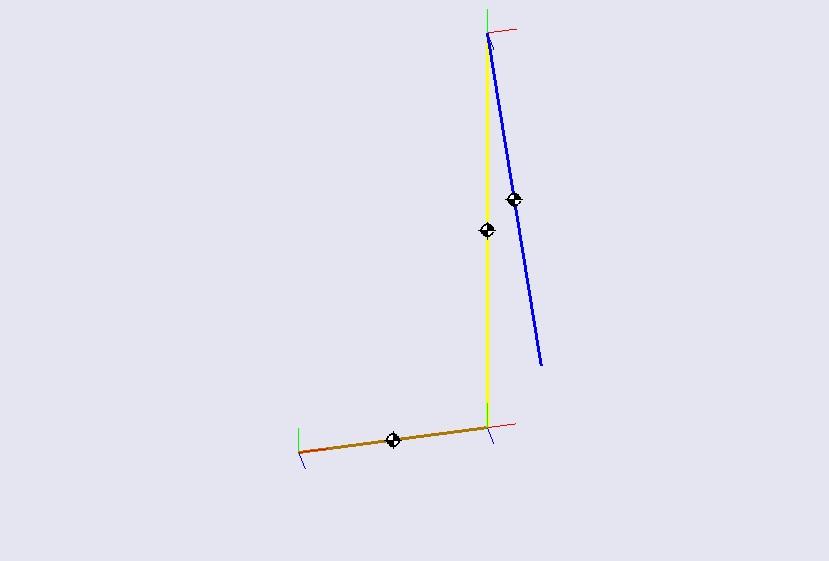
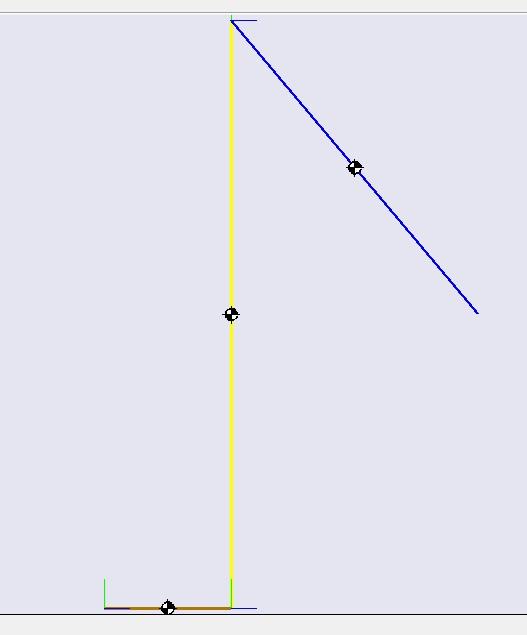
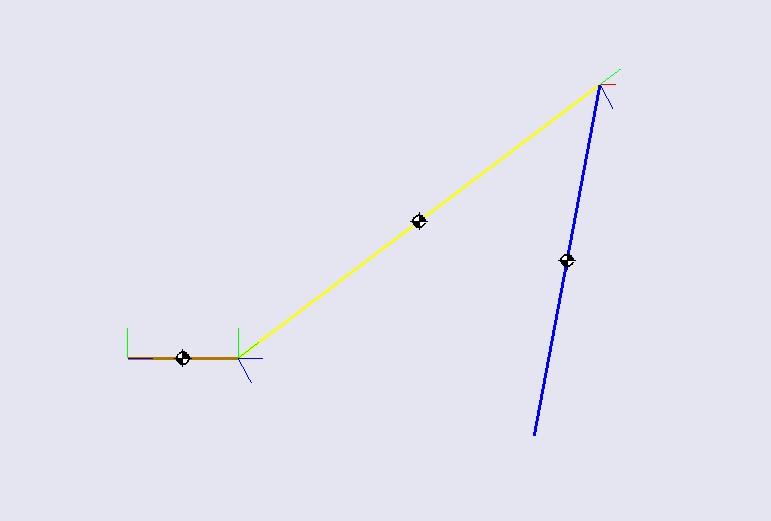
- As the team built a 3 joint robotic arm, all the 3 servo-motors included in the Lego Mind storms kit were to be used to control the motion of the arm. Every motor was required to perform a specific task which leads to the proper defining the translation of every motor to maximize the manipulability of the arm. Base motor which also acted as our link 1 rotates about the y axis and the middle link motor (link 2) and striker link motor (link3) rotates about the x axis. Using the platform of Simulink in MATLAB was used to simulate the response for every motor individually to understand the behaviour of the model. After performing several tests, team determined that the PID controller provided with the best results as compared to those of P and PD controller. Also, the PID controller was preferred by the team members because from the past experience and incorporating the knowledge from Control Systems. Team knew that PID controller helps in reducing the POS as well as help the system to obtain a faster settling time which was our goal while controlling the motors. The POS would significantly decrease the precision and accuracy level for the system which is not acceptable in our case of detecting the ball.
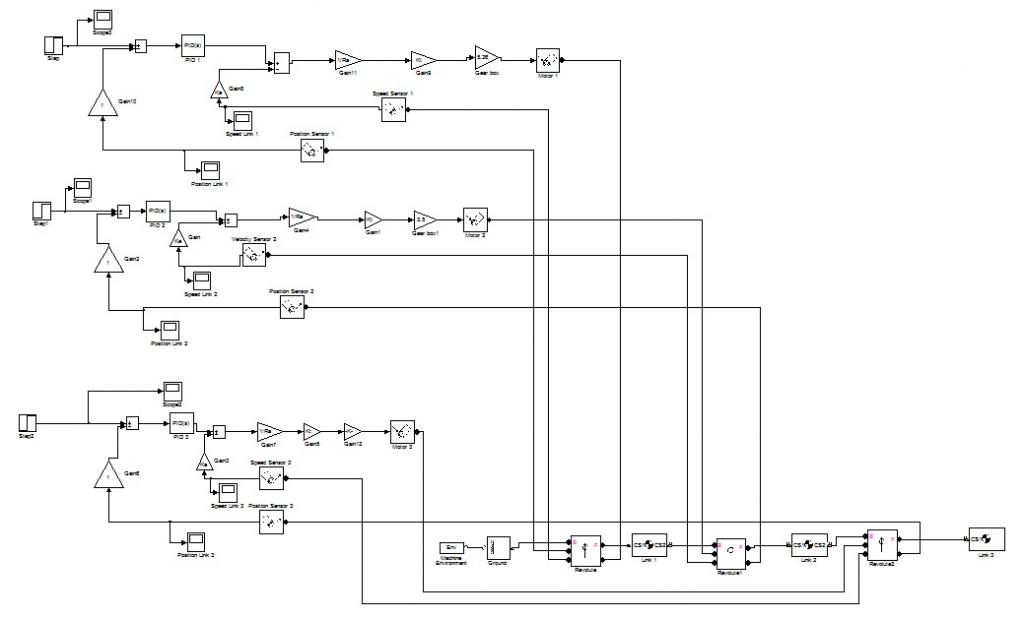
- Further, the PID controller was designed in Simulink and the linked to the SimMechanics to obtain the real life data for analysis and tune the gains of the PID accordingly to obtain a better response. In the Simulink model for the motors, the gear ratio for every motor was added as a gain to the model of specific motors with respect to their links.
- The system’s Simulink model was created by using the DC servo motor model for Lab 2 and also incorporating the knowledge of SimMechanics gained by the SimMechanics model of a single and double pendulum. The position response is summarized underneath for every link as the 3 links were actuated one at a time to obtain the better understanding as well as response of the links when all three links are actuated at the same time.